HC10, HC10DT
Robot współpracujący z ludźmi, 6 zintegrowanych czujników momentu obrotowego
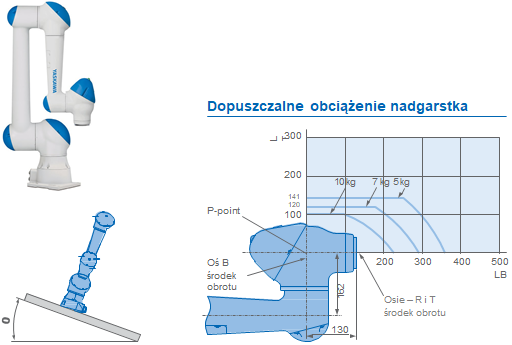
MOTOMAN HC10DT jest 6-osiowym robotem współpracującym, o udźwigu 10 kg. Bezpieczeństwo zapewnia technologia Power and Force Limit, która zatrzymuje robota w przypadku kontaktu z operatorem.
Ramię robota może być prowadzone ręcznie przez operatora, a pozycje robota i chwytaka mogą być rejestrowane za pomocą „Easy Teaching Switch Box”. Funkcje te zapewniają oszczędność czasu podczas programowania robota. Geometria ramienia robota została zaprojektowana w taki sposób, aby uniknąć punktów uszczypnięcia dłoni czy palca.
W zależności od oceny ryzyka, robot MOTOMAN HC10 może pracować bez dodatkowych środków ochronnych czy wygrodzeń. Instalacja może być niemal dowolna, dzięki czemu oszczędzamy czas i miejsce, a dzięki swojej uniwersalności robot może pracować na różnych stanowiskach pracy.
KLUCZOWE KORZYŚCI
Kontroler
- Całkowicie przemysłowy sterownik robota
- YRC1000 dla modeli HC10 i HC10DT
- YRC1000micro dla HC10DT
Wysokie bezpieczeństwo
- Siła kontaktu pomiędzy robotem i operatorem jest ograniczona do bezpiecznego poziomu.
- Bezpieczeństwo według projektu: zaokrąglone krawędzie bez punktów uszczypnięcia (ochrona dłoni i palców)
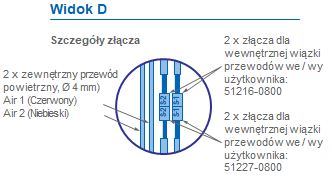
- Wewnętrzne prowadzenie kabli
- Normy bezpieczeństwa – zastosowania dla robotów przemysłowych: ISO 10218-1 (5.10.5 Ograniczenie mocy i siły)
- Zgodność z ISO TS 15066
- Funkcje bezpieczeństwa sterownik robota przemysłowego: ISO 13849-1, PLd, Kat. 3
- Moduł bezpieczeństwa funkcjonalnego w zestawie
Easyteaching
- Przesuwanie ramienia robota bezpośrednio za pomocą funkcji prowadzenia ręcznego: łatwy tryb nauczania za pomocą modułu przełączeniowego
Brak wygrodzeń
- W zależności od rodzaju aplikacji, robot HC10 może pracować bez wygrodzeń bezpieczeństwa
Motoman HC10
| Specyfikacja HC10 | ||||||
| Osie | Maksymalny zakres ruchu [º] | Maksymalna prędkość [º/sek] | Dopuszczalny moment [Nm] | Dopuszczalny moment bezwład. [kg · m2] | Kontrolowane osie | 6 |
| Max. ładowność [kg] | 10 | |||||
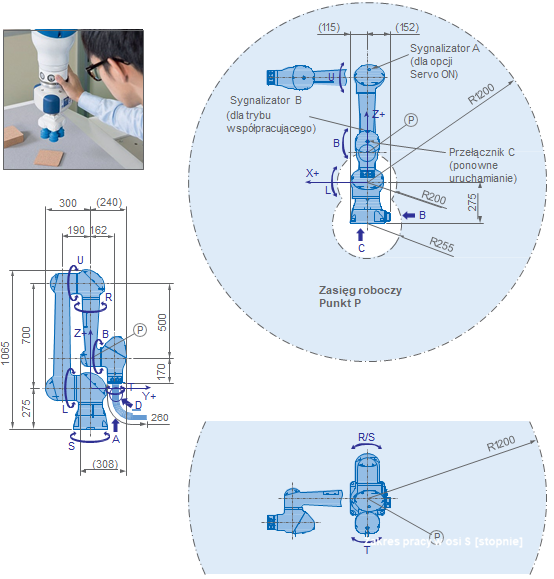
| S | ±180 | 130 | – | – | Powtarzalność [mm] | ±0.1 |
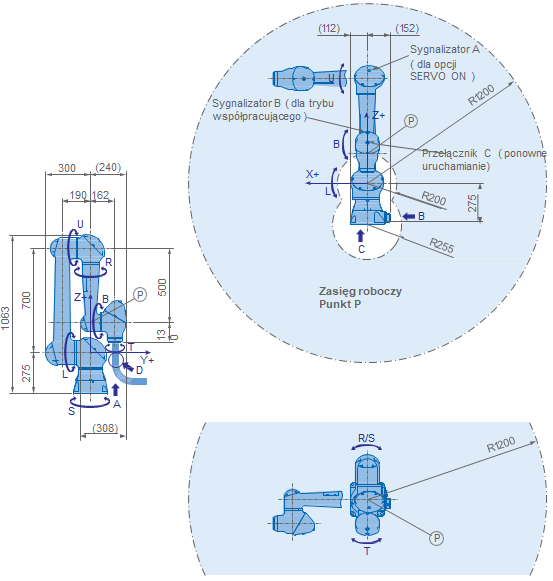
| L | ±180 | 130 | – | – | Max. Zasięg roboczy R [mm] | 1200 |
| U | +355/–5 | 180 | – | – | Temperatura [ºC] | 0 to +40★ 0 to +35★★ |
| R | ±180 | 180 | 27.4 | 0.78 | Wilgotność [%] | 20 – 80 |
| B | ±180 | 250 | 27.4 | 0.78 | Waga [kg] | 47 |
| T | ±180 | 250 | 9.8 | 0.1 | Zasilanie, średnie [KVA] | 1 |
Motoman HC10DT
| Specifications HC10 DT | ||||||
| Osie | Maksymalny zakres ruchu [º] | Maksymalna prędkość [º/sek] | Dopuszczalny moment [Nm] | Dopuszczalny moment bezwład. [kg · m2] | Kontrolowane osie | 6 |
| Max. ładowność [kg] | 10 | |||||
| S | ±180 | 130 | – | – | Powtarzalność [mm] | ±0.1 |
| L | ±180 | 130 | – | – | Max. Zasięg roboczy R [mm] | 1200 |
| U | +355/–5 | 180 | – | – | Temperatura [ºC] | 0 to +40 |
| R | ±180 | 180 | 25.3 | 0.73 | Wilgotność [%] | 20 – 80 |
| B | ±180 | 250 | 25.3 | 0.73 | Waga [kg] | 48 |
| T | ±180 | 250 | 9.8 | 0.1 | Zasilanie, średnie [KVA] | 1 |