Aplikacje współpracujące
Aplikacje współpracujące stały się obiektem wielu dyskusji w trakcie kilku minionych lat. Ideą tej nowej koncepcji jest stworzenie elastycznego miejsca pracy, aby móc nadążać za najnowszymi trendami rynkowymi i wymaganiami klientów dotyczącymi bardziej spersonalizowanych produktów, wytwarzanych w mniejszych partiach.
YASKAWA oferuje pełną gamę produktów spełniających wymagania klientów.
Czym jest współpracująca stacja robocza i w jaki sposób różni się od robota współpracującego
We współpracującej stacji roboczej brany jest pod uwagę nie tylko robot współpracujący z człowiekiem, ale cała koncepcja stanowiska pracy, wyposażenia i zastosowania, a także zakres i rodzaj interakcji człowiek-maszyna. Rezultatem jest złożona jednostka w zakładzie produkcyjnym, która musi być zgodna ze standardami określonymi dla danego terytorium. W Europie obowiązującą normą jest Dyrektywa Maszynowa MD2006 / 42 / WE i normy pochodne ISO 10218-2.
Z drugiej strony robot współpracujący jest urządzeniem, automatycznie wykonującym skomplikowane, często powtarzalne zadania; jest zaprojektowany z gładkimi krawędziami i powierzchniami, aby wyeliminować punkty zakleszczenia i często jest wyposażony w dodatkowe czujniki do wykrywania ludzi lub innych przeszkód podczas kolizji. Roboty współpracujące są zgodne z ISO 10218-1 i TS 15066 i osiągają minimalny poziom wydajności PLd, Kat. 3 zgodnie z ISO 13849-1.

Możliwe tryby współpracy
Istnieją cztery tryby współpracy zdefiniowane w ISO TS 15066:
- Monitorowane zatrzymanie bezpieczeństwa
- Ręczne prowadzenie
- Monitorowanie prędkości i separacji
- Ograniczenie mocy i siły
1. Monitorowane zatrzymanie bezpieczeństwa
Typ aplikacji:
- Używana gdy robot pracuje głównie sam
- Interakcja człowieka z robotem jest okazjonalna
Procedura działania:
- Kiedy człowiek wkracza w zdefiniowany, ograniczony obszar, robot zaprzestaje ruchu (serwomechanizm jest włączony, ale aktywują się hamulce)
- Robot wznawia ruch, kiedy parametry bezpieczeństwa są zrestartowane (np. po naciśnięciu przez obsługę przycisku resetu, gdy człowiek opuszcza wyznaczoną strefę itp.)
Typ robota:
- Standardowy robot przemysłowy
Przykład:
- Człowiek wykonuje operacje na przedmiocie trzymanym przez robota
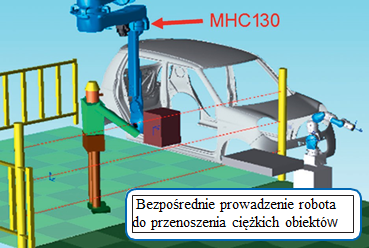
2. Ręczne prowadzenie robota
Typ aplikacji:
- Stosowana do uczenia ścieżki, po której poruszać ma się ramię robota lub jego ręcznego prowadzenia
- Aplikacje podnoszenia i przenoszenia
Procedura działania:
- Człowiek przełącza robota w tryb nauki
- Robot pracuje z osłonami bezpieczeństwa w trybie PLAY lub REMOTE
Typ robota:
- Standardowy robot przemysłowy z dodatkowym czujnikiem kinetycznym
Przykład:
- Szybkie i proste nauczanie ścieżki
- Prowadzenie robota podczas montażu siedzenia w nadwoziu samochodu
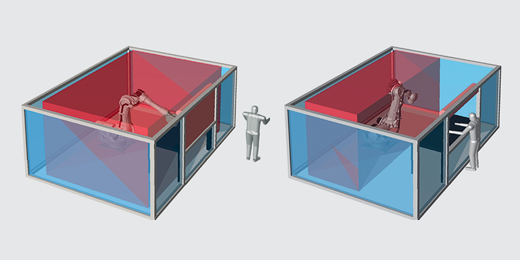
3. Monitorowanie prędkości i separacji
Typ aplikacji:
- Wykorzystuje skanery laserowe, kurtyny świetlne lub systemy wizyjne do śledzenia pracownika
Procedura działania:
- Robot pracuje w określonych strefach bezpieczeństwa i reaguje w zależności od strefy, w której zostanie wykryty człowiek (np. zwalnia do 50% zwykłej prędkości pracy, zwalnia do 20% zwykłej prędkości pracy, zatrzymuje się itp.)
Typ robota:
- Standardowy robot przemysłowy z dodatkowym urządzeniem wykrywającym do monitorowanie strefy bezpieczeństwa (np. safetyEYE firmy PILZ, skaner bezpieczeństwa lub kurtyna świetlna firmy SICK itp.)
Przykład:
- Ładowanie przyrządów, odkładanie gotowych produktów
4. Ograniczenie mocy i siły

Typ aplikacji:
- –Robot pracuje obok człowieka bez dodatkowych urządzeń bezpieczeństwa
Procedura działania:
- Robot monitoruje zewnętrzne siły przykładane do jego korpusu i reaguje, podejmując określone akcje (np. zatrzymanie się, wycofanie się)
Typ robota:
- Specjalizowany robot przemysłowy ze specjalnymi funkcjami ograniczającymi siłę
- Robot ma zaokrąglone kształty w celu rozpraszania siły w przypadku uderzenia
- W zależności od wyników analizy ryzyka może nie wymagać dodatkowych urządzeń zabezpieczających
Przykład:
- Obsługa maszyn, kompletowanie i pakowanie, montaż itp.Ładowanie przyrządów, odkładanie gotowych produktów
Korzyści z robotów o ograniczonej sile
Łatwość programowania:
- Ręczne prowadzenie
- Przyjazny interfejs użytkownika (np. przyciski, strzałki, animacje i wizualizacje itp.)
Łatwe operacje:
- Łatwe procedury rozruchu
Łatwa instalacja w środowisku:
- Lekkie ramię robota
- Jednostka bez wygrodzenia (w zależności od wyniku oceny ryzyka)
Tańsza jednostka:
- Bez wygrodzenia lub dodatkowych urządzeń bezpieczeństwa (w zależności od wyniku oceny ryzyka)
Tańsze działanie:
- Nie jest wymagane specjalne szkolenie operatorów lub pracowników
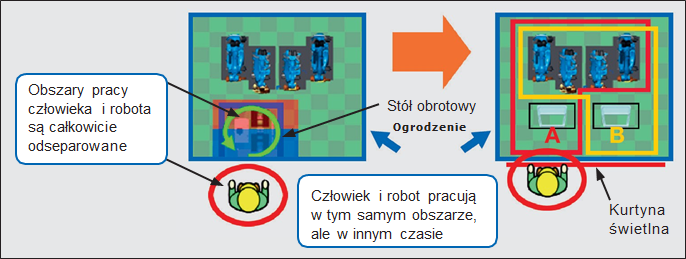
Formy kolaboracji
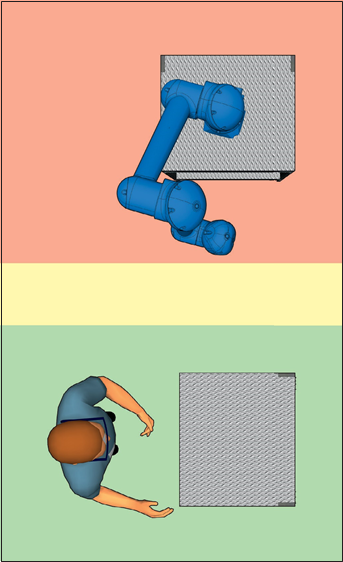
Współistnienie
- Człowiek i robot mają odseparowane, niekolidujące ze sobą strefy pracy
- Człowiek może okazjonalnie wkroczyć w obszar pracy robota
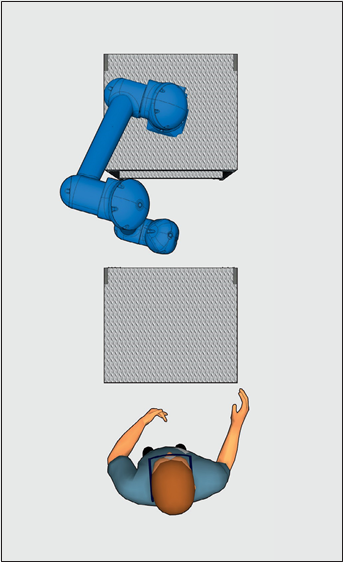
Współdziałanie
- Robot i człowiek dzielą obszar pracy
- Człowiek może regularnie wkraczać w obszar pracy robota
- Człowiek i robot pracują nad osobnymi zadaniami
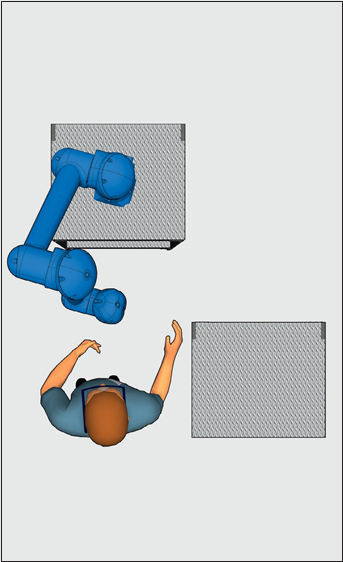
Współpraca
- Robot i człowiek dzielą obszar pracy
- Człowiek wkracza w obszar pracy robota często lub nieustannie
- Człowiek i robot pracują nad tym samym zadaniem
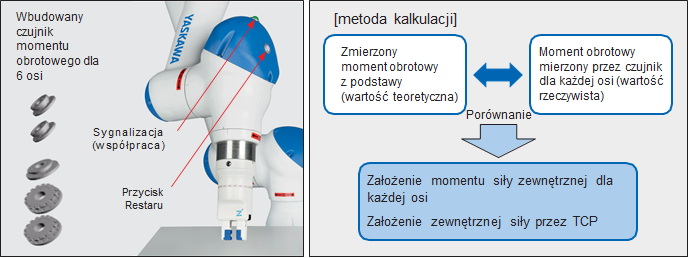
Funkcja PFL (Ograniczenie mocy i siły)
- Funkcja bezpieczeństwa oparta na informacjach z 6 wbudowanych czujników momentu obrotowego w ramieniu robota
- Gdy siła zewnętrzna działająca na robota przekroczy poziom dopuszczalny (na jednej z osi, TCP), robot zatrzymuje się
- Po naciśnięciu przycisku restartu robot wycofuje zabezpieczenie i ponownie wznawia ruch
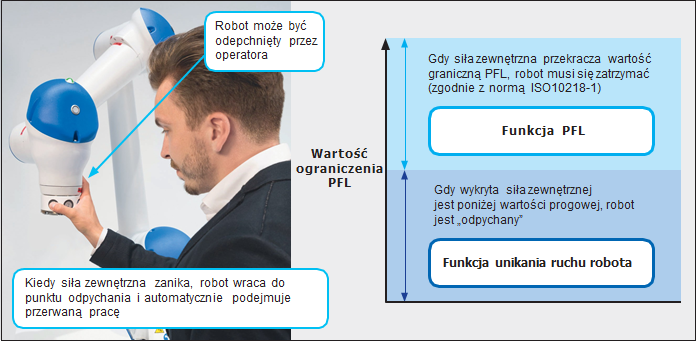
Funkcja unikania ruchu robota
- Funkcja aplikacji oparta na wartości siły zewnętrznej przyłożonej do ramienia robota
- Robot może być odepchnięty od użytkownika proporcjonalnie do przyłożonej siły
- Kiedy siła zewnętrzna zanika, robot wraca do punktu odpychania i wznawia działanie
Funkcja prowadzenia
- Funkcja aplikacji umożliwiająca operatorowi ręczne prowadzenie robota
- Robot porusza się w wybranym układzie współrzędnych (prostokątnym, osiowym)

Funkcje FSU – Funkcje dostępne także dla HC10
- Funkcja aplikacji oparta o podejmowanie decyzji na podstawie wartości siły zewnętrznej przyłożonej do robota
- Robot może zostać odepchnięty od użytkownika na podstawie wektora przyłożonej siły zewnętrznej
- Kiedy siła zewnętrzna zanika, robot wraca do punktu odepchnięcia i kontynuuje wykonywaną operację
